
A
world in which people who suffer from tetraplegia can walk again seems out of
grasp. Are we talking about creating iron man suits? Yes, but not entirely like
those seen in the movies. Although, suits quite similar in prospect in which
sensors are placed over paralyzed areas of the body to reestablish coordinated
movement with a simple thought are beginning to be crafted. Quite literally,
researchers at Case Western Reserve University in Cleveland, Ohio have begun to
reestablish the grasp of individuals who have not been able to have control
over the coordination of their limbs for years. Through the novel field of
neuroprothetics, machine brain interfaces have been utilized to decode motor
signals sent to them originating in the cortex via an electrode, which then can
process the signals computationally and transmit them as electrical impulses to
the sensors placed in the muscles of the limb, generating the desired movement.
The research team’s work at Case Western Reserve University assisted Bill
Kosechav to reestablish control over his arm muscles after eight years of
paralyzation. This case has been able to provide hope to people who suffer from
various spinal cord injuries that have left them paralyzed, that they too will
be able to control the movements of their limbs once again. With novel machine
brain interface technology this goal seems to be more attainable than ever
before.
First
it is necessary to begin by understanding the process of motor signaling in the
body. All movements begin with a thought. These thoughts of movement are projected
as electrical signals of the motor cortex. How do our thoughts of movement then
get to the muscles in which we want to move? Essentially the process of establishing
movement of the arm is that we think that we want to move the arm, this
movement is coded into a signal which travels via the spinal cord down to the
limb of interest, which then has a mechanism for decoding the signal and
responding with the corresponding movement. In this way the brain can be
thought of as a computational device, a wiring system whose signals can be
decoded and manipulated as a piece of machinery. How can these signals be decoded
and manipulated to produce the specified movement if the spinal cord is
injured? These motor signals are beginning to be rerouted via novel machine
brain interface technology that has the ability to decipher them and convert
them to electrical pulses, ultimately taking place of the vital role of the
spinal cord. When someone suffers paralyzation from say a car accident, their
paralyzation stems from their spinal cord being severed. The spinal cord is the
mechanism by which motor messages from the brain get delivered to the limbs. In
most instances such as Bill Kochevar, the site of his spinal cord injury prevents
the transfer of motor signals from his motor cortex to his limbs, therefore
leaving his limbs unable to receive the signals directing their movement. A
routing system for these motor signals thankfully can be reestablished via the
workings of a machine interface and placement of sensors around the desired
muscles.
The
research team at Case Western Reserve University was able to bridge his motor
cortical thoughts to his paralyzed limbs by detouring the spinal cord. They are
the first in the world to restore functioning such as this in a person with
tetraplegia. His arm, once again became mobile because cortical control was
able to be reestablished. Bill has now regained the ability to reach and grasp
with the coordinated movement of his shoulder, arm, and hand once again. His
thoughts have been decoded by the computer machine interface, and relayed to
the sensors in his arm that can reassert that signal and move the arm in the
way in which he wanted it to move.
The
researchers began by surgically implanting an electrode in the area of Bill
Kochevar’s motor cortex that is responsible for crafting signals of hand
movement. Bill Kochevar had four months of thought training with the machine
interface to ensure that the movement of the virtual hand on the computer matched
the signals of motor direction from his brain. Virtual reality training allowed
the computer to begin to decipher and recognize which motor signals/ thoughts
of motor movement coded for the corresponding hand movements. This training
involved Bill Kochevar thinking of moving his arm in a specific way and
watching the computer interface decipher these signals of movement and portray
them via the movements of a virtual hand on the computer screen. After this
baseline training of the machine interface, 36 muscle stimulating electrodes
were implanted into his upper and lower arm. His electrical sensors rested on
top of his skin and were manipulated at bay by the computer interface.
Seventeen
days after the sensors in his arm were implanted, they were connected to the
machine interface that would then begin to send them deciphered electrical
signals from the motor cortex. The research team stimulated these muscles in
his arm for eight hours a week and for eighteen weeks to improve his arm
strength, establish a regain of movement, and to reduce fatigue after several
years without use. After these additional seventeen days of training of the
sensors on his arm, the entire machine interface system could begin working its
magic. The entire machine brain interface system begins with the electrode that
was inserted in his brain that detects and decodes certain brain signals from
the area of the motor cortex in charge of hand and arm movement. These specific
signals are sent to the computer interface which receives and then translates
the signals into corresponding electrical impulses to the muscle stimulating
electrodes in his arms. The electrical impulses can fire in a specific pattern
resulting in the original movement/ contraction of those muscles in which was
instructed by the motor cortex. In this way, the machine brain interface
mechanism can bypass the spinal cord injury and reestablish the connection
between Bill’s thoughts and the dictation of the motor movement of his
limbs. At this point in time, Bill still
has to utilize a mobile arm support for his shoulder against the forces of
gravity as he works to manipulate the movement in his lower arm once
again. This mobile arm support, which coordinates
movement of his shoulder muscles up and down is also under cortical control.
Bill Kochevar can now slowly but surely feed himself after eight years of not
being able to do so. He is also able to grasp and move objects about thanks to
this technology.
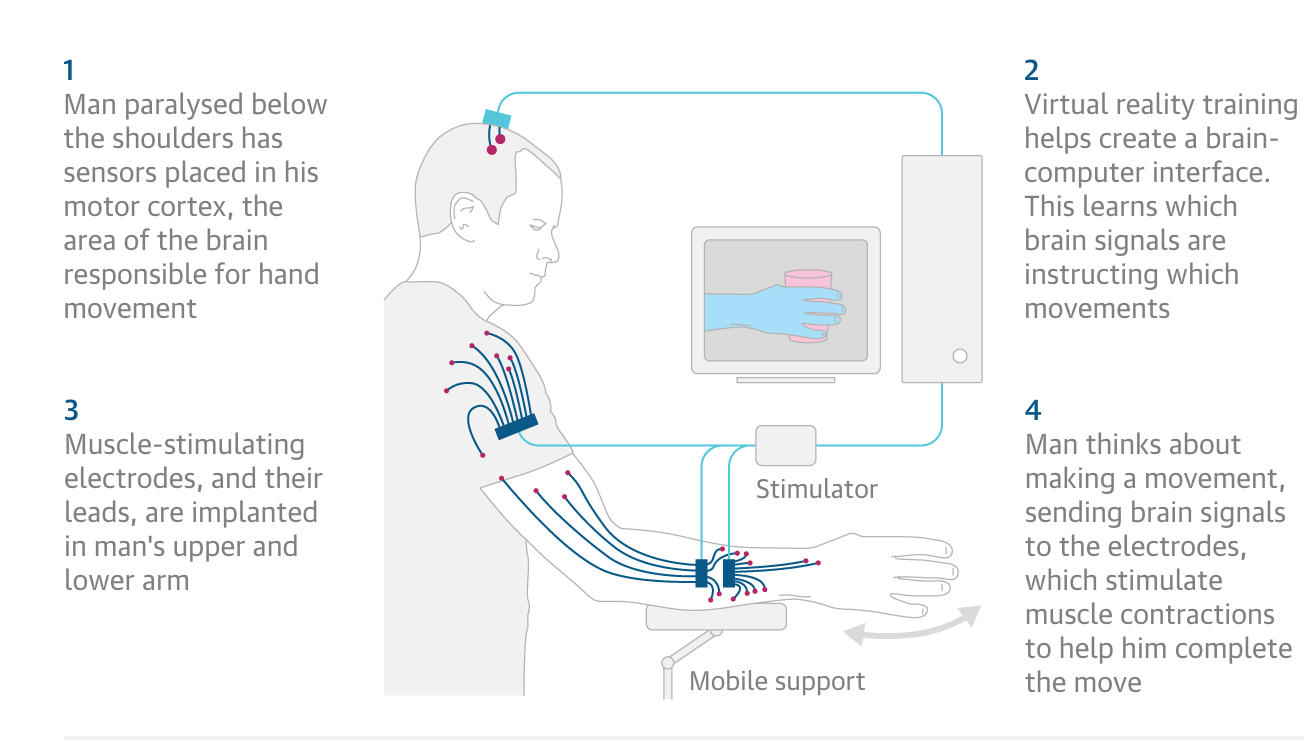 (How Neuro-prosthesis reconnects brain and muscles~ The Lancet)
(How Neuro-prosthesis reconnects brain and muscles~ The Lancet)
Even
though Bill has regained movement of his arm, there are still a number of
limitations to this machine brain interface technology. For instance, the
number of muscles that can be stimulated from the electrode via the sensors are
few and are spatially limited. This is
due to the arduous process of manipulating multiple cortical areas at once and
the limiting nature of the placement of the electrical sensors on the skin.
Moreover, the decoded signals produce rough and slow movements in the areas in
which they stimulate which still makes movement quite debilitating and
restricting. Also, quite obviously, the large electrode in the brain requires
an invasive surgery to place quite perfectly into the motor cortex and the
large computer required as a machine interface is not practical and interferes
with day to day activity. Additionally, there is still a reliance on the
computer for consistent feedback upon each movement. This leaves the treatment
far from ready for use outside the lab.
Despite these drawbacks of the current state
of machine brain interface technology, this achievement of the rehabilitation
of Bill Kochevar’s paralyzed limb remains an exciting demonstration of the
power of manipulation of the motor signals in the brain. This illuminates the abilities
of the motor signals of the brain to be deciphered by a computational device
and wired as electrical signals to other areas of the body. The research team
of Mr. Jonas and Mr. Kording demonstrate the ways in which the brain can not be
directly assessed and manipulated as a computer in, “Could a Neuroscientist
Understand a processor?”. They demonstrated a division in neuroscientific
research between a computer system and the brain. They highlighted on the ways
that they are incohesive and provide no form of further understanding. They did
so by applying data analysis methods utilized in neuroscience in attempt to
further understand a microprocessor. In the end, the data collected from this engineered
model organism via typical neuroscientific methods of analyzation of local
field potentials, lesions, etc. were not able to progress their deeper level understanding
of the processor. Dr. Mark Albert went
into this even further in a recent talk that he gave to the Loyola University
Neuroscience community in which he highlighted the lack of understanding and limitations of current neuroscientific methods. While their claims
are very illuminating indeed and do in fact raise many questions for the
Neuroscience community and the effectiveness of current research methods,
technologies such as the machine brain interface should not be scraped to the
curb. Machine brain interface technology has proven to serve as a method by
which the computational characteristics/wiring of the brain can be utilized and
reconstructed to manipulate the biological wiring of the body successfully. The
success of the brain machine interface calls for the identification of areas of
the brain that we can be successfully manipulated electronically and those that
are unable to be deciphered and replicated as such.
Back
to the iron man suit ordeal. As of now, manipulating the rerouting of motor
signals to several limbs of the body at once is not possible. However, in the
future, when this machine brain interface technology is further developed, as
is the case with the improvements seen in any other technological device, there
are many areas of improvement that can help reestablish full independence to
paralyzed individuals. For instance,
there can be a reduction in the size of the electrode/detector in the brain to the
size of a computer chip so that the surgical implantation is not as invasive and
that a large cord is not debilitating in its nature. Additionally, this
computer chip lying on top of the motor cortex could then signal electronically
to a machine interface which is also the size of a computer chip that can be
placed into a cellphone so that the interface can be carried around easily. Can
we take it further to surgically implant these electrical sensors on the
paralyzed limbs under the skin and around those muscles that have suffered from
paralyzation so that consumers do not have to wear clothing made up of sensors?
That way, paralyzed individuals reroute the motor signals from their cortex to
their limbs via a computational and technological interaction between a chip in
their motor cortices, the computer chip in their phone, and the sensors on
multiple debilitated limbs. These technological manipulations can make the
machine brain interface more practical. It will help formally paralyzed
individuals regain their independence and movement of their limbs without
walking around with a large electrode in their brain and a bulky computer. Forget
the iron man suit. We don’t want something so bulky and restricting. Machine brain
interface technology gives us a chance to erect a more practical method of
regaining strength and motor coordination in paralyzed limbs.
Works Cited
Jonas E, Kording KP (2017) Could a
Neuroscientist Understand a Microprocessor? PLoS Comput Biol 13(1): e1005268.
doi:10.1371/ journal.pcbi.1005268
"Paralysed
man moves arm using power of thought in world first." 29 March 2017. The guardian. Ed. Sarah Boseley. 8 October 2017
<https://www.theguardian.com/science/2017/mar/28/neuroprosthetic-tetraplegic-man-control-hand-with-thought-bill-kochevar>.
The Lancet. "How Neuro-prosthesis reconnects brain and
muscles."[Image] The guardian.
No comments:
Post a Comment